변환 보기(Direct3D 9)
이 섹션에서는 보기 변환의 기본 개념을 소개하고 Direct3D 애플리케이션에서 뷰 변환 매트릭스를 설정하는 방법에 대한 세부 정보를 제공합니다.
보기 변환은 월드 공간에 뷰어를 배치하여 꼭짓점을 카메라 공간으로 변환합니다. 카메라 공간에서 카메라 또는 뷰어는 원점에 있으며 양의 Z축 방향을 바라봅니다. Direct3D는 왼손 좌표계를 사용하므로 z는 장면에 긍정적입니다. 뷰 매트릭스는 월드의 개체를 카메라의 위치(카메라 공간의 원점) 및 방향 주변으로 다시 배치합니다.
여러 가지 방법으로 뷰 매트릭스를 만들 수 있습니다. 어떤 경우에도 카메라는 월드 공간에서 장면의 모델에 적용되는 보기 매트릭스를 만들기 위한 시작점으로 사용되는 논리적 위치 및 방향을 갖습니다. 보기 매트릭스는 개체를 좌표 이동하고 회전하여 카메라 공간에 배치합니다. 여기서 카메라는 원점입니다. 보기 매트릭스를 만드는 한 가지 방법은 좌표 이동 매트릭스를 각 축의 회전 매트릭스와 결합하는 것입니다. 이 방법에서는 다음과 같은 일반 매트릭스 수식이 적용됩니다.
이 수식에서 V는 생성된 보기 매트릭스이고, T는 월드에서 개체를 다시 배치하는 좌표 이동 매트릭스이고, Rₓ~Rz는 x-, y-, z-축을 기준으로 개체를 회전하는 회전 매트릭스입니다. 좌표 이동 및 회전 매트릭스는 월드 공간에서 카메라의 논리적 위치 및 방향을 기반으로 합니다. 월드에서 카메라의 논리적 위치가 <10,20,100>인 경우 좌표 이동 매트릭스의 목표는 개체를 x-축 방향으로 -10단위, y-축 방향으로 -20단위, z-축 방향으로 -100단위만큼 이동하는 것입니다. 수식의 회전 매트릭스는 카메라 공간의 축이 월드 공간과 어긋나게 회전된 정도라는 면에서 카메라의 방향을 기반으로 합니다. 예를 들어 앞에서 언급한 카메라가 바로 아래를 가리키면 다음 일러스트레이션과 같이 z-축은 월드 공간의 z-축과 90도(pi/2 라디안) 어긋나 있습니다.
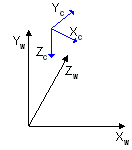
회전 매트릭스는 장면의 모델에 크기는 같지만 방향이 반대인 회전을 적용합니다. 이 카메라의 보기 매트릭스는 x축을 기준으로 -90도 회전을 포함합니다. 회전 매트릭스를 좌표 이동 매트릭스와 결합하여 장면에서 개체의 위치와 방향을 조정하는 보기 매트릭스를 만들 수 있습니다. 그러면 꼭대기가 카메라를 향하기 때문에 카메라가 모델 위에 있는 모양을 제공합니다.
보기 매트릭스 설정
D3DXMatrixLookAtLH 및 D3DXMatrixLookAtRH 도우미 함수는 카메라 위치 및 조사 지점에 따라 보기 매트릭스를 만듭니다.
다음 예제에서는 왼손 좌표에 대한 뷰 행렬을 만듭니다.
D3DXMATRIX out;
D3DXVECTOR3 eye(2,3,3);
D3DXVECTOR3 at(0,0,0);
D3DXVECTOR3 up(0,1,0);
D3DXMatrixLookAtLH(&out, &eye, &at, &up);
Direct3D는 월드 및 보기 매트릭스를 사용하여 여러 내부 데이터 구조를 구성합니다. 새로운 월드 매트릭스 또는 보기 매트릭스를 설정할 때마다 시스템에서 관련 내부 구조를 다시 계산합니다. 이러한 매트릭스를 자주 설정하면 계산에 많은 시간이 소요됩니다. 월드 매트릭스 및 보기 매트릭스를 월드 매트릭스로 설정한 월드 보기 매트릭스에 연결한 다음 보기 매트릭스를 ID로 설정하면 필요한 계산의 수를 최소화할 수 있습니다. 필요에 따라 월드 매트릭스를 수정하고 연결하고 초기화할 수 있도록 개별 월드 및 보기 매트릭스의 캐시된 복사본을 보관해 두세요. 명확성을 위해 샘플은 이 최적화를 거의 채택하지 않습니다.
관련 항목