Placering av rumslig analyskamera
Viktigt!
Den 30 mars 2025 dras Azure AI Vision Spatial Analysis tillbaka. Övergå till Azure AI Video Indexer eller en annan lösning med öppen källkod före det angivna datumet. Vi rekommenderar att du byter tidigare för att få de rikare fördelarna med Azure AI Video Indexer. Förutom de välbekanta funktioner som du använder, här är en snabb jämförelse mellan Azure AI Vision Spatial Analysis och Azure AI Video Indexer.
| Funktion | Rumslig analys i Azure AI Vision | Azure AI Video Indexer |
|---|---|---|
| Edge-stöd | Ja | Ja |
| Objektidentifiering | Person- och fordonsidentifiering | Identifierar över 1 000 objekt |
| Ljud-/talbearbetning | Stöds inte | Stöds (inkluderar talranskription, översättning och sammanfattning) Stöds >(inkluderar talranskription och attitydanalys) |
| Händelseidentifiering och spårning | Stöds (spåra personer och fordon, händelseidentifiering) | Stöds inte på Edge ännu. Stöds delvis i molnet. |
| Stöd för Azure Arc | Stöds inte | Internt stöd |
| Fokusområde | Visuell analys med specialiserad spårning | Omfattande analys av både ljud- och visuellt innehåll |
Från och med nu fram till den 30 mars 2025 kan du fortsätta att använda Azure AI Vision Spatial Analysis eller övergå till Azure AI Video Indexer före det angivna datumet. Efter den 30 mars 2025 stöds inte längre containern Spatial Analysis och kommer att sluta bearbeta nya strömmar.
Den här artikeln innehåller kameraplaceringsrekommendationer för scenarier med rumslig analys (offentlig förhandsversion). Den innehåller allmänna riktlinjer samt specifika rekommendationer för höjd, vinkel och kamera-till-brännpunkt-avstånd för alla inkluderade åtgärder.
Kommentar
Den här guiden är utformad för Axis M3045-V-kameran. Den här kameran har en upplösning på 1920x1080, 106 graders vågrätt synfält, 59 graders vertikalt synfält och en fast brännvidd på 2,8 mm. Principerna nedan gäller för alla kameror, men specifika riktlinjer för kamerahöjd och avstånd från kamera till brännpunkt måste justeras för användning med andra kameror.
Allmänna riktlinjer
Tänk på följande allmänna riktlinjer när du placerar kameror för rumslig analys:
- Belysningshöjd" Placera kameror under belysningsarmaturer så att armaturerna inte blockerar kamerorna.
- Hinder: För att undvika att hindra kameravyer, notera hinder som poler, skyltar, hyllor, väggar och befintliga LP-kameror.
- Miljö bakgrundsbelysning: Utomhus bakgrundsbelysning påverkar kamerans bildkvalitet. För att undvika svåra bakgrundsbelysningsförhållanden bör du undvika att rikta kameror mot yttre fönster och glasdörrar.
- Lokala sekretessregler och föreskrifter: Lokala regler kan begränsa vilka kameror som kan fångas. Se till att du förstår lokala regler och föreskrifter innan du placerar kameror.
- Byggnadsstruktur: HVAC, sprinklers och befintliga ledningar kan begränsa hård montering av kameror.
- Kabelhantering: Se till att du kan dirigera en Ethernet-kabel från planerade kameramonteringsplatser till Ström via Internet-växeln (PoE).
Höjd, brännpunktsavstånd och vinkel
Du måste tänka på tre saker när du bestämmer hur du installerar en kamera för rumslig analys:
- Kamerahöjd
- Avstånd från kamera till brännpunkt
- Kamerans vinkel i förhållande till golvplanet
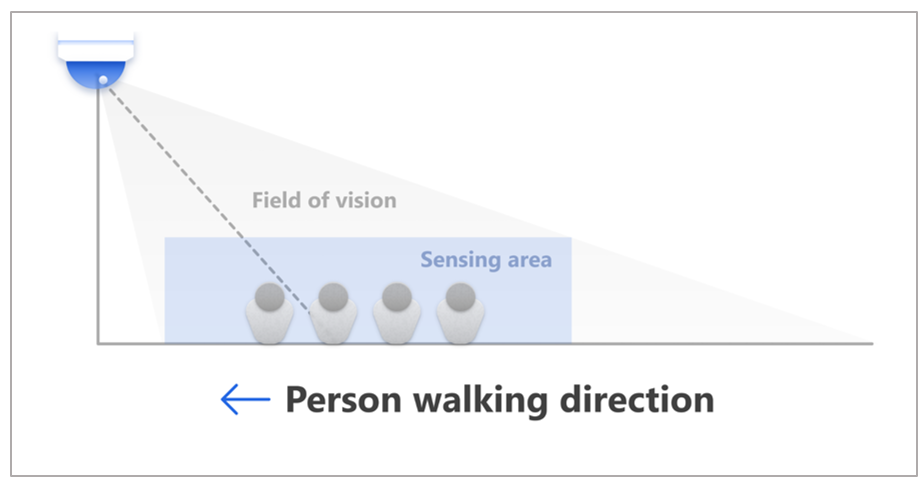
Det är också viktigt att känna till riktningen som majoriteten av människor går (person gångriktning) i förhållande till kamerafältet om möjligt. Den här riktningen är viktig för systemets prestanda.
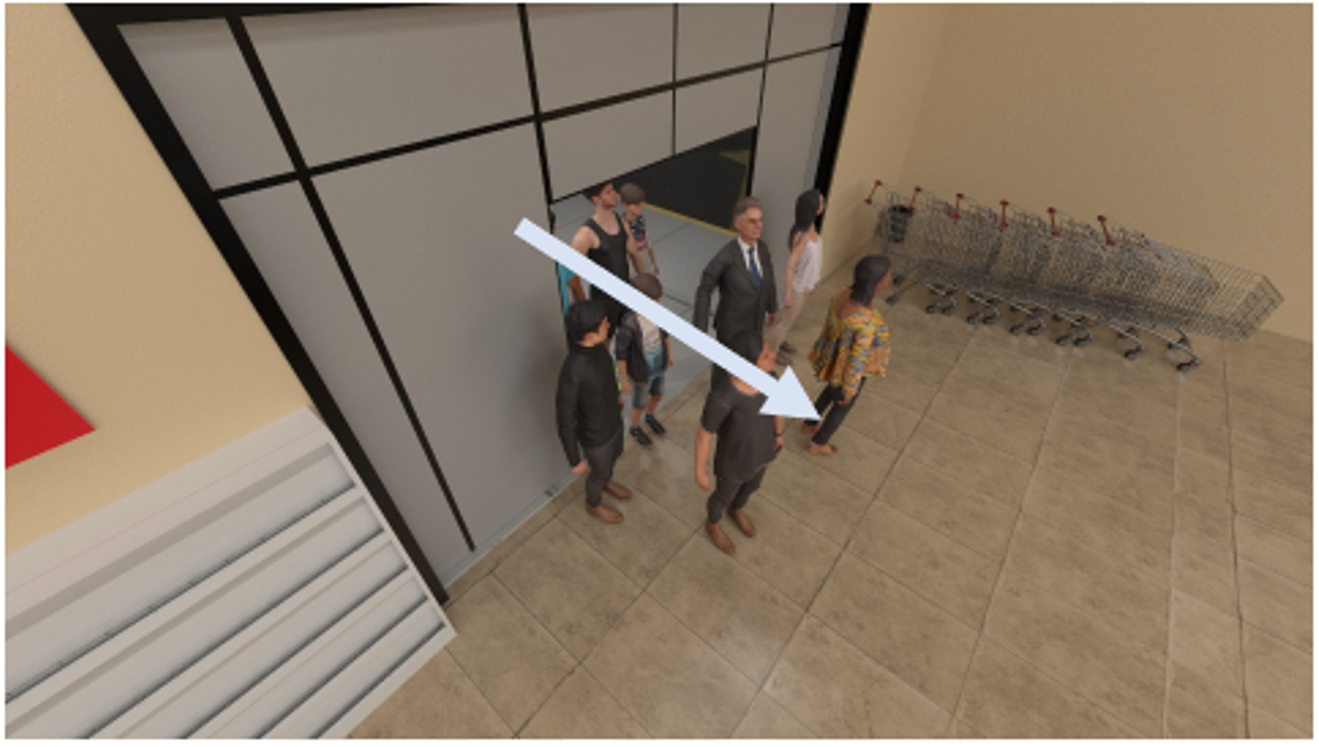
Följande bild visar höjningsvyn för personens gångriktning.
Kamerahöjd
I allmänhet bör kameror monteras 12-14 fot från marken. För ansiktsmaskidentifiering rekommenderar vi att kameror monteras 8-12 fot från marken. När du planerar kameramonteringen i det här intervallet bör du överväga hinder (till exempel hyllor, hängande lampor, hängande skyltar och skärmar) som kan påverka kameravyn och sedan justera höjden efter behov.
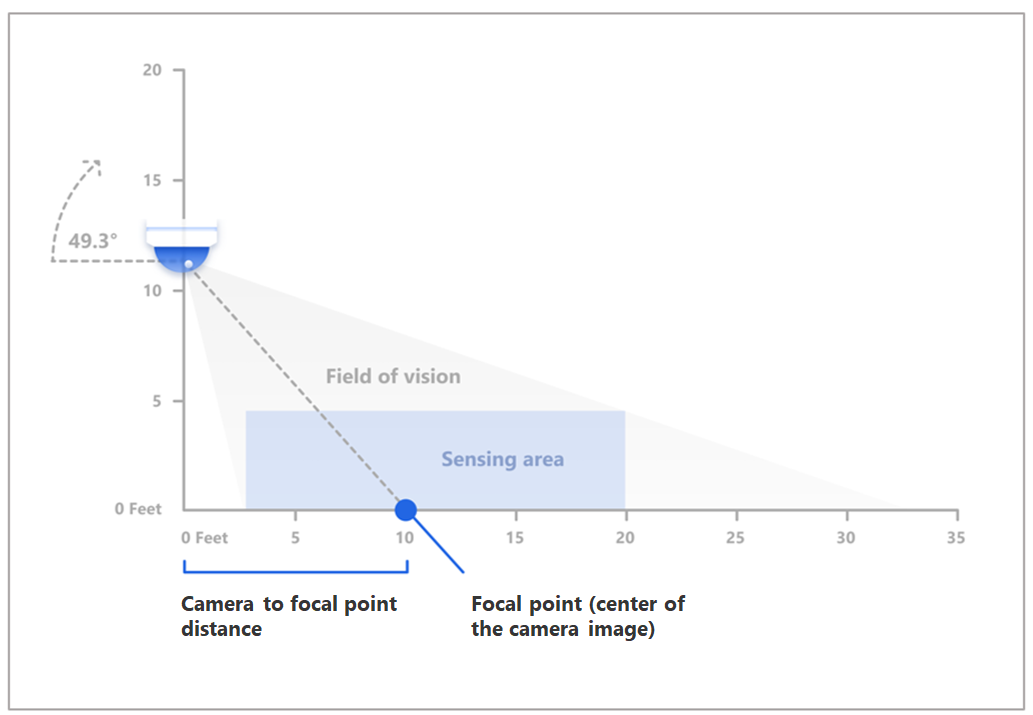
Avstånd från kamera till brännpunkt
Avstånd från kamera till brännpunkt är det linjära avståndet från brännpunkten (eller mitten av kamerabilden) till kameran som mäts på marken.

Detta avstånd mäts på golvplanet.
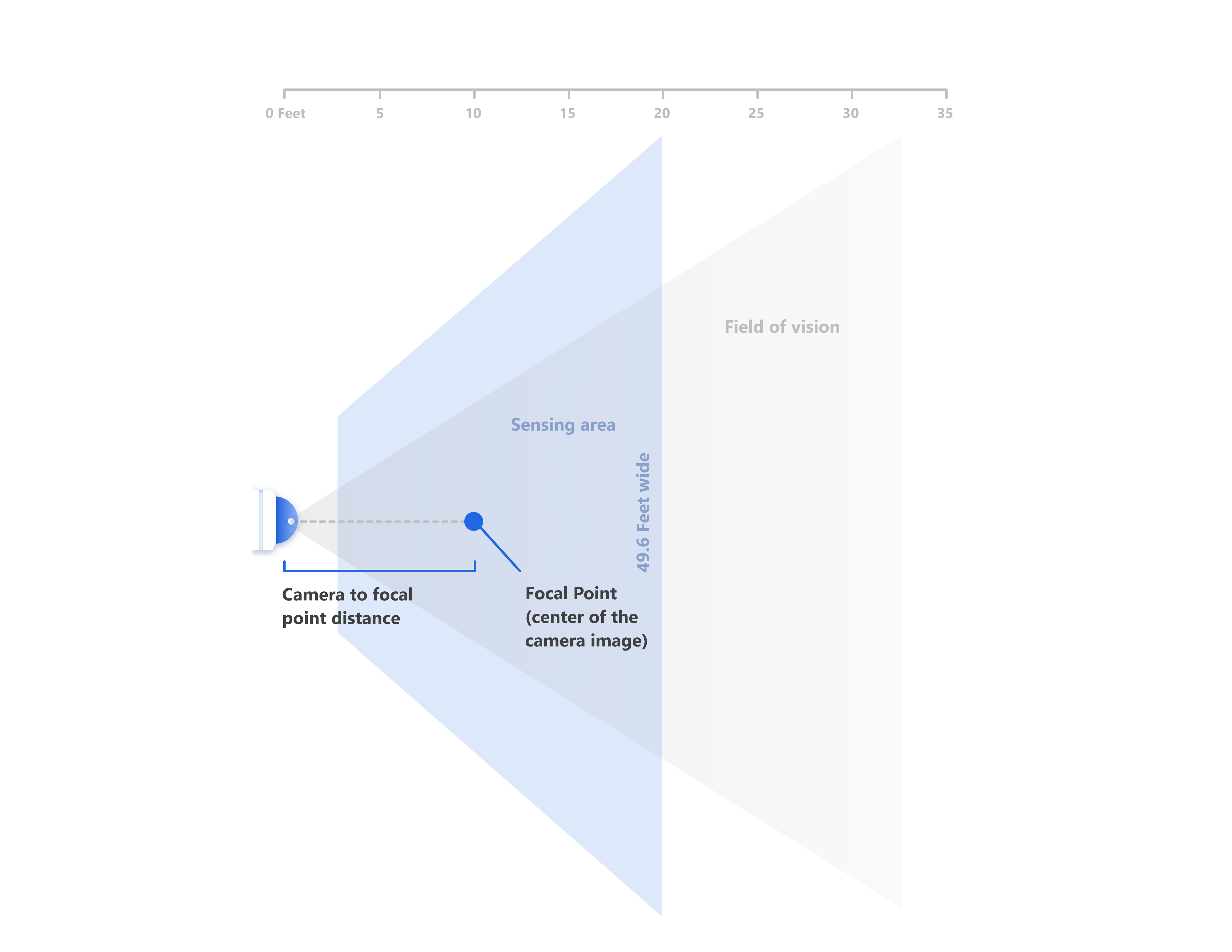
Från ovan ser det ut så här:
Använd tabellen nedan för att fastställa kamerans avstånd från brännpunkten baserat på specifika monteringshöjder. Dessa avstånd är för optimal placering. Observera att tabellen ger vägledning under rekommendationen 12-14 eftersom vissa tak kan begränsa höjden. För ansiktsmaskidentifiering är rekommenderat avstånd från kamera till brännpunkt (min/max) 4-10 för kamerahöjd mellan 8 och 12.
| Kamerahöjd | Avstånd från kamera till brännpunkt (min/max) |
|---|---|
| 8' | 4.6'-8' |
| 10' | 5.8'-10' |
| 12' | 7'-12' |
| 14' | 8'-14'' |
| 16' | 9.2'-16' |
| 20' | 11.5'-20' |
Följande bild simulerar kameravyer från närmaste och längsta avstånd från kamera till brännpunkt.
| Närmaste | Längst |
|---|---|
 |
 |
Monteringsintervall för kameravinkel
I det här avsnittet beskrivs godtagbara monteringsintervall för kameravinkel. Dessa monteringsintervall visar det acceptabla intervallet för optimal placering.
Linjekonfiguration
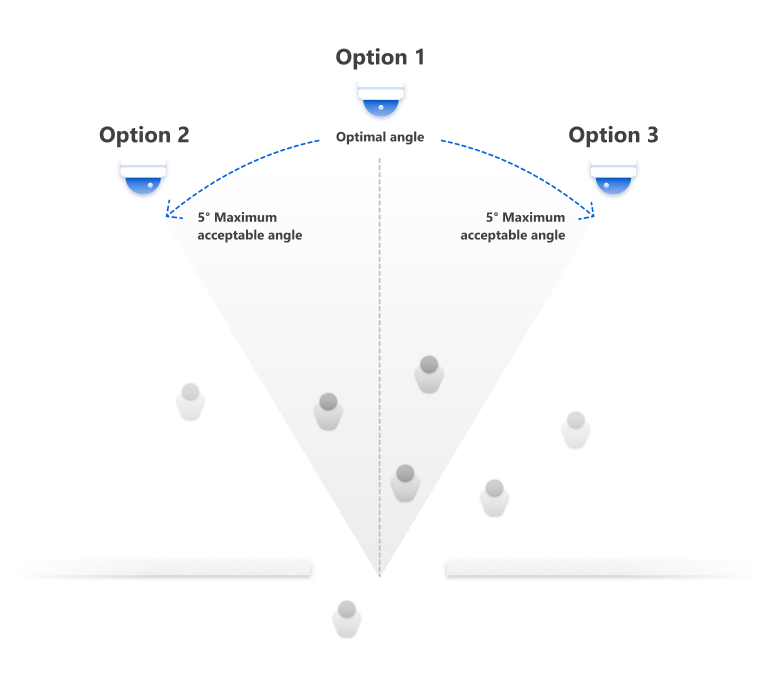
För cognitiveservices.vision.spatialanalysis-personcrossingline operation är +/-5° den optimala kameramonteringsvinkeln för att maximera noggrannheten.
För ansiktsmaskidentifiering är +/-30 grader den optimala kameramonteringsvinkeln för kamerahöjd mellan 8 och 12'.
Följande bild simulerar kameravyer med hjälp av monteringsvinkelrekommendationerna längst till vänster (-) och längst till höger (+) för att använda cognitiveservices.vision.spatialanalysis-personcrossingline för att göra ingångsräkning på ett dörrsätt.
| Vyn Längst till vänster | Vyn Längst till höger |
|---|---|
 |
 |
Följande bild visar kameraplacering och monteringsvinklar från ett fågelperspektiv.
Zonkonfiguration
Vi rekommenderar att du placerar kameror på 3 meter eller mer ovan jord för att garantera att det täckta området är tillräckligt stort.
När zonen ligger bredvid ett hinder som en vägg eller hylla monterar du kameror på angivet avstånd från målet inom det acceptabla 120-graders vinkelintervallet som visas i följande bild.
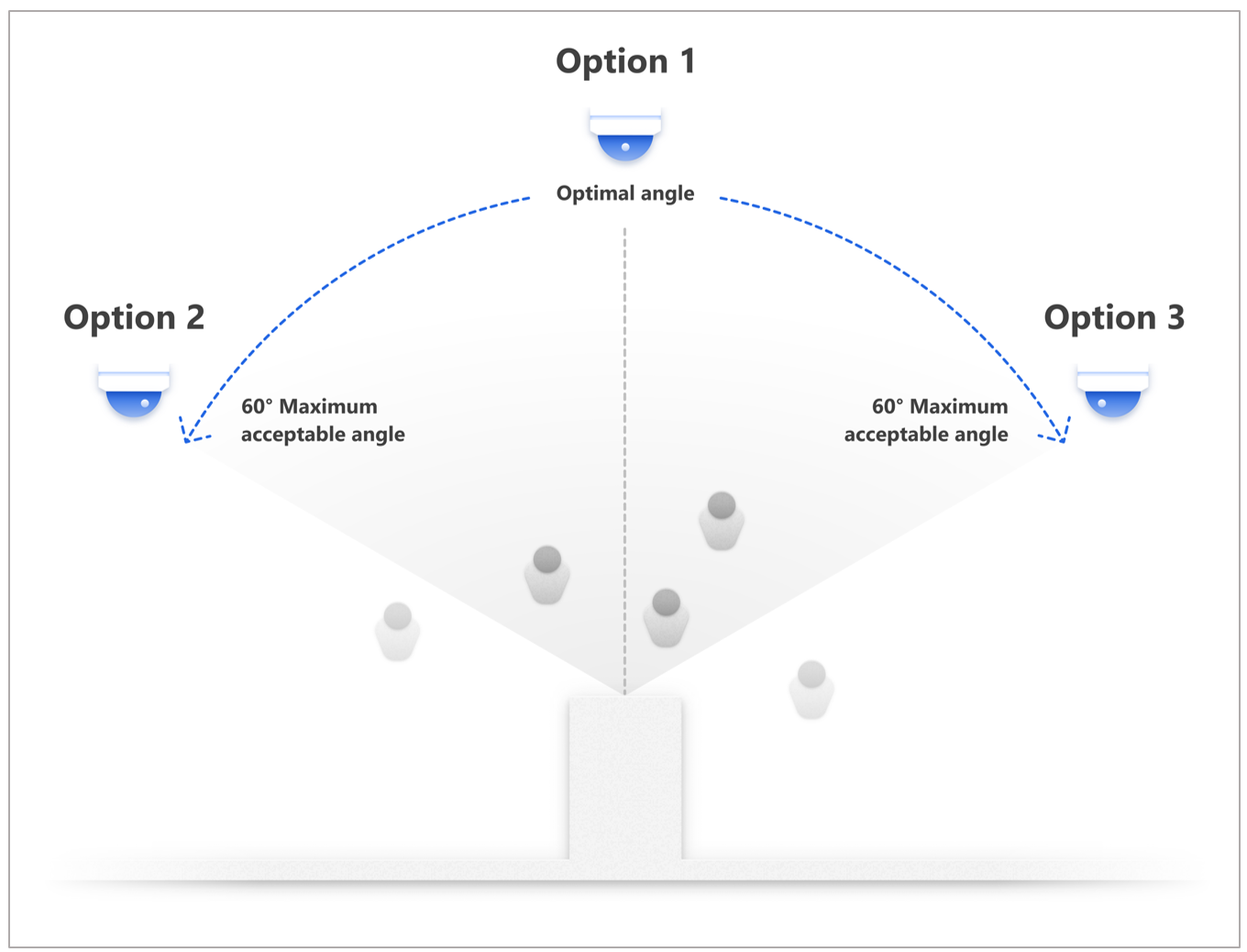
Följande bild innehåller simuleringar för vänster och höger kameravyer över ett område bredvid en hylla.
| Vänster vy | Högervy |
|---|---|
 |
 |
Köer
Kunskaperna cognitiveservices.vision.spatialanalysis-personcount, cognitiveservices.vision.spatialanalysis-persondistance och cognitiveservices.vision.spatialanalysis-personcrossingpolygon kan användas för att övervaka köer. För optimal ködatakvalitet föredras infällbara bandbarriärer för att minimera ocklusionen av personerna i kön och se till att köplatsen är konsekvent över tid.
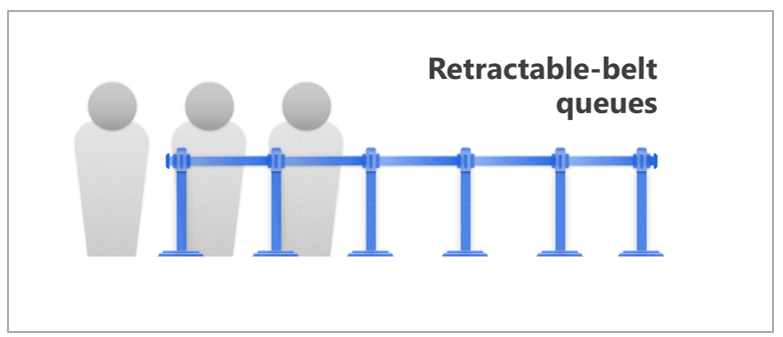
Den här typen av barriär föredras framför ogenomskinliga hinder för köbildning för att maximera noggrannheten i insikterna från systemet.
Det finns två typer av köer: linjär och zig-zag.
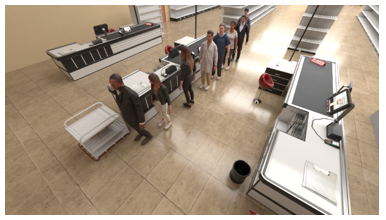
Följande bild visar rekommendationer för linjära köer:
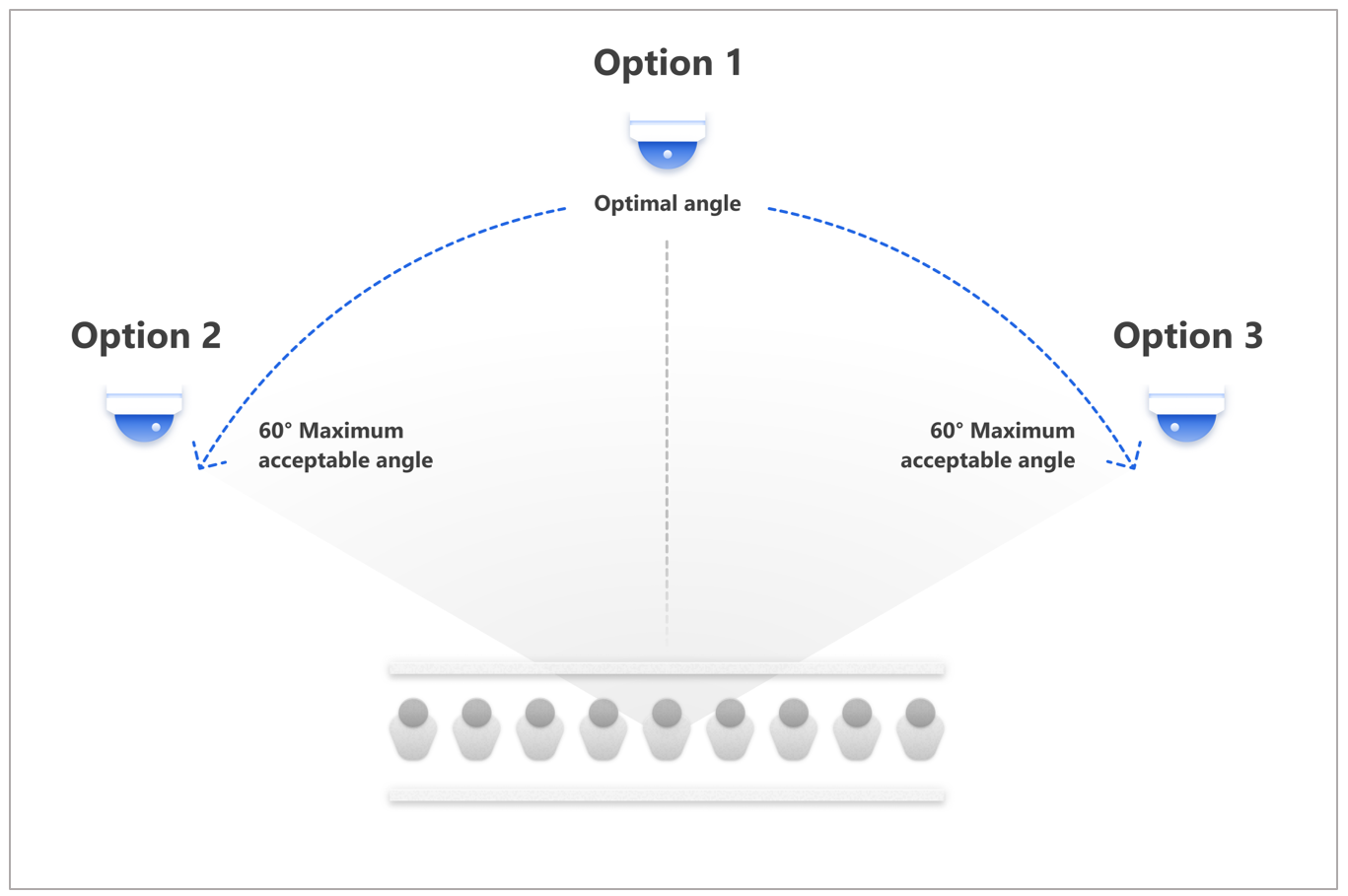
Följande bild innehåller simuleringar för vänster och höger kameravyer av linjära köer. Observera att du kan montera kameran på motsatt sida av kön.
| Vänster vy | Högervy |
|---|---|
 |
 |
För zig-zag-köer är det bäst att undvika att placera kameran direkt mot kölinjens riktning, som du ser i följande bild. Observera att var och en av de fyra exempelkamerapositionerna i bilden ger den idealiska vyn en acceptabel avvikelse på +/- 15 grader i varje riktning.
Följande illustrationer simulerar vyn från en kamera som placeras på de idealiska platserna för en zig-zag-kö.
| Vy 1 | Vy 2 |
|---|---|
 |
 |
| Vy 3 | Vy 4 |
|---|---|
 |
 |
Organiska köer
Organiska köer är rader som bildas organiskt. Det här köformatet är acceptabelt om köer inte bildar fler än 2–3 personer och radformulären i zondefinitionen. Om kölängden vanligtvis är fler än 2–3 personer rekommenderar vi att du använder en infällbar bandbarriär för att vägleda köriktningen och se till att linjeformulären inom zondefinitionen används.